силы, мера действия силы, зависящая от численной величины и направления силы и от перемещения точки её приложения. Если сила F численно и по направлению постоянна, а перемещение М0М1 прямолинейно (рис. 1), то P. A = F•s•cosa, где s=M0M1, a - угол между направлениями силы и перемещения. Когда a<90в°, р.="" силы="" положительна,="" при="" 180в°?a="">90В° - отрицательна, а при a=90В°, т. е. когда сила перпендикулярна перемещению, А=0. Единицы измерения Р.: джоуль (в СИ), 1 эрг=10-7 Дж и килограмм-сила на метр (1 кгс•м=9,81 Дж).
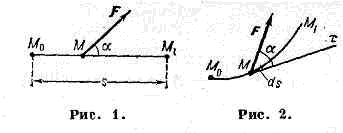
В общем случае для вычисления Р. силы вводится понятие элементарной работы dA=Fdscosa, где ds - элем. перемещение, a - угол между направлениями силы и касательной к траектории точки её приложения, направленной в сторону перемещения (рис. 2). В декартовых координатах
dA=Fxdx+Fydy+Fzdz, (1)
где Fx, Fy, Fz - проекции силы на координатные оси, х, у, z - координаты точки её приложения.
В обобщённых координатах
dA=SQidqi. (2)
где qi - обобщённые координаты, Qi - обобщённые силы. Для сил, действующих на тело, имеющее неподвижную ось вращения, dA=Mzdj, где Mz - сумма моментов сил относительно оси вращения z, j - угол поворота. Для сил давления dA=pdV, где р - давление, V - объём.
Р. силы на конечном перемещении определяется как интегральная сумма элементарных Р. и при перемещении М0М1 выражается криволинейным интегралом:
A=?M0M1)(Fcosa)ds или
A=?M0M1(Fxdx + Fydy + Fzdz). (3)
Для потенциальных сил dA=-dП и А= П0-П1, где П0 и П1 - значения потенциальной энергии П в нач. и конечном положениях системы; в этом случае Р. не зависит от вида траекторий точек приложения сил. При движении механич. системы сумма работ всех действующих сил на нек-ром перемещении равна изменению её кинетической энергии Т, т. е. SАi=T1-T0. Понятие «Р. силы» широко используется в механике, а также в др. областях физики и в технике.
Р. в термодинамике - обобщение понятия «Р. в механике» (выраженного в дифф. форме (2)). Обобщённые координаты в термодинамике -это внеш. параметры термодинамич. системы (объём, напряжённость внеш. магн. или электрич. поля и т. п.), а обобщённые силы (давление и др.) - величины, зависящие не только от координат, но и от внутр. параметров системы (темп-ры или энтропии). Р. термодинамич. системы над внеш. телами заключается в изменении состояния этих тел и определяется кол-вом энергии, передаваемой системой внеш. телам при изменении внеш. параметров системы. В квазистатических (т. е. бесконечно медленных) адиабатических процессах Р. равна изменению внутренней энергии системы, в квазистатич. изотермических процессах - изменению Гельмгольца энергии. В ряде случаев Р. может быть выражена через др. потенциалы термодинамические. В общем случае величина Р. при переходе системы из нач. состояния в конечное зависит от способа (пути), каким осуществляется этот переход. Это означает, что бесконечно малая (элементарная) Р. системы не явл. полным дифференциалом к.-л. функции состояния системы; поэтому элем. Р. обозначают обычно не dA (как полный дифференциал), а dА. Зависимость Р. от пути приводит к тому, что для кругового процесса, когда система вновь возвращается в исходное состояние, Р. системы может оказаться не равной нулю, что используется во всех тепловых двигателях. Работа внеш. сил над системой dА=-dA, если энергия вз-ствия системы с внеш. телами не меняется в процессе совершения Р. Примерами Р. при изменении одного из внеш. параметров системы могут служить: Р. сил давления р при изменении объёма V системы dA=pdV, Р. сил поверхностного натяжения при изменении поверхности системы dA=-sdS (s - коэфф. поверхностного натяжения, dS - элемент поверхности); Р. намагничивания системы dA=-HdJ (H - напряжённость внеш. магн. поля, J - намагниченность в-ва) и т. д. Р. системы в неравновесном (необратимом) процессе всегда меньше, чем в равновесном.
 В закладки будет добавлено толкование к данному слову в данном словаре. Закладки сохраняются на Вашем компьютере в cookie. Если Ваш браузер не поддерживает cookie или такая возможность отключена, то сохранение закладок будет не возможно.
В закладки будет добавлено толкование к данному слову в данном словаре. Закладки сохраняются на Вашем компьютере в cookie. Если Ваш браузер не поддерживает cookie или такая возможность отключена, то сохранение закладок будет не возможно.